정확한 위치 추정을 위한 진동 보정
거친 지형과 고르지 않은 노면은 Visual SLAM 시스템의 성능을 저하시킬 수 있습니다. VIO 카메라는 IMU 데이터와 영상 입력을 융합하여 왜곡을 실시간으로 보정하고, 깊이 추정 정확도를 높이며 위치 추정 오차를 줄입니다.
이를 통해 변화가 큰 야외 환경에서도 안정적인 내비게이션과 장애물 회피를 지원합니다.

Robotics Camera for AMRs and UGVs
진동 보정과 위치 추정 정확도를 높이는 Visual-Inertial Odometry 카메라
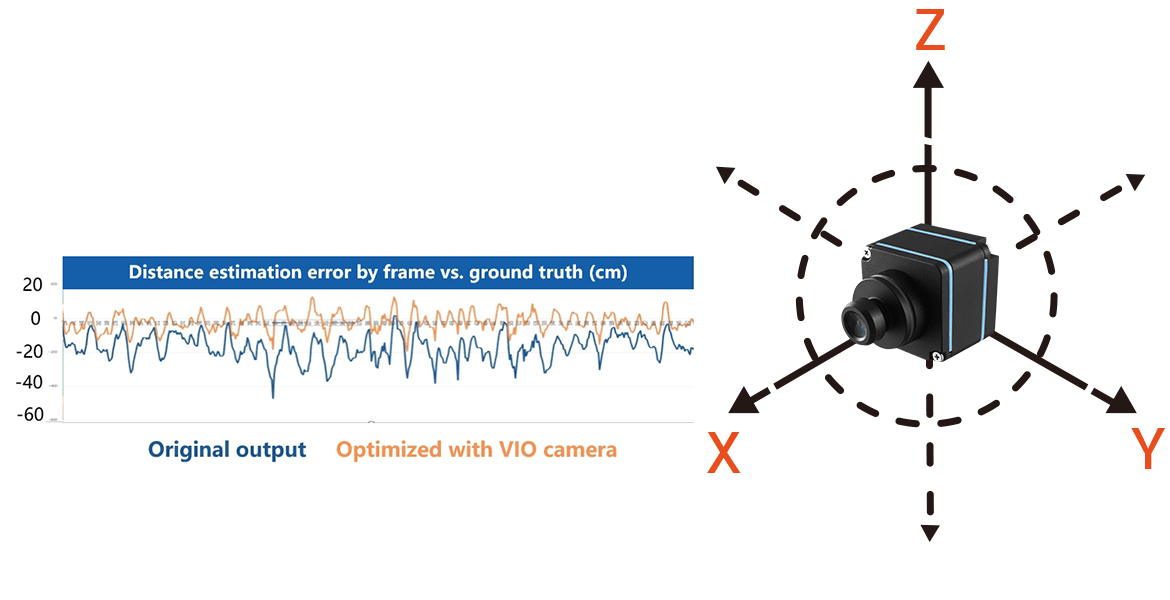
VIO(Visual-Inertial Odometry) 카메라는 IMU(Inertial Measurement Unit)를 통합하여 칼만 필터 처리 후 가속도와 각속도 데이터를 제공합니다. 이를 통해 진동을 효과적으로 보정하고, 안정적인 이미지 출력과 더 정확한 거리 측정을 지원합니다.
자율 로봇과 무인 차량의 내비게이션 및 장애물 회피 성능을 향상시키며, 동적인 실제 주행 환경에서도 신뢰성 있는 성능을 제공하도록 설계되었습니다.
Core Strengths
영상 입력과 IMU 데이터를 결합해 거친 노면, 진동, 실외 환경에서도 안정적인 위치 추정과 로봇 비전 성능을 지원합니다.
거친 지형과 고르지 않은 노면은 Visual SLAM 시스템의 성능을 저하시킬 수 있습니다. VIO 카메라는 IMU 데이터와 영상 입력을 융합하여 왜곡을 실시간으로 보정하고, 깊이 추정 정확도를 높이며 위치 추정 오차를 줄입니다.
이를 통해 변화가 큰 야외 환경에서도 안정적인 내비게이션과 장애물 회피를 지원합니다.
카메라 모듈 내부에 IMU와 MCU를 직접 통합하여 작고 독립적인 시스템 아키텍처를 구성합니다. 내장 MCU는 6축 IMU 데이터(가속도계 + 자이로스코프)에 대해 확장 칼만 필터를 실행하여 중앙 ECU의 처리 부담을 줄입니다.
동시에 신뢰성 있는 자세 및 모션 데이터를 제공하여 배선 복잡도를 낮추고 공간을 절약하며, 엣지 AI 구축 환경의 시스템 신뢰성을 향상시킵니다.
VIO Camera는 엄격한 자동차 표준을 만족하도록 설계되어 야외 환경에서 장기간 안정적으로 운용할 수 있습니다. 지속적인 진동, 극한 온도, 직사광선, 비, 먼지와 같은 조건을 견딜 수 있는 견고한 구조를 갖췄습니다.
신뢰성이 특히 중요한 AMR, UGV 및 기타 로보틱스 플랫폼에서 일관된 성능을 제공하도록 설계되었습니다.

Models
프로젝트 환경에 맞춰 해상도, 센서, 화각, 출력 인터페이스를 기준으로 적합한 모델을 검토할 수 있습니다.
※ 세부 인터페이스, 케이블 구성, 호스트 플랫폼 호환성은 프로젝트 사양에 따라 상담 후 확인합니다.
Korea Sales
제품명, 플랫폼, 개발 일정, 예상 수량을 알려주시면 적합한 oToBrite 카메라 솔루션을 검토해 드립니다.